はじめに
お久しぶりです。ドローン製作記録です。
ハンダゴテなどの機材を揃えていたら結構な時間が経ってしまいましたが、前回購入した基盤の配線と大まかな部品の組み立てをしました。
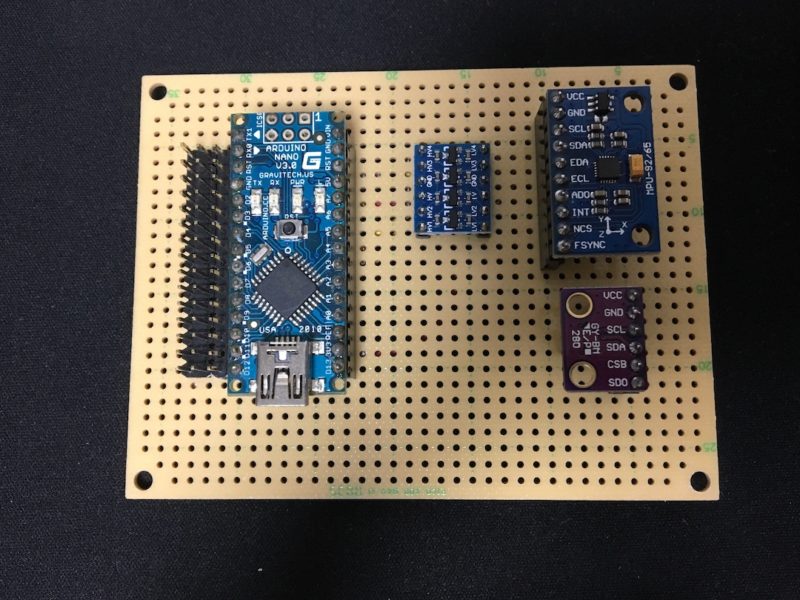
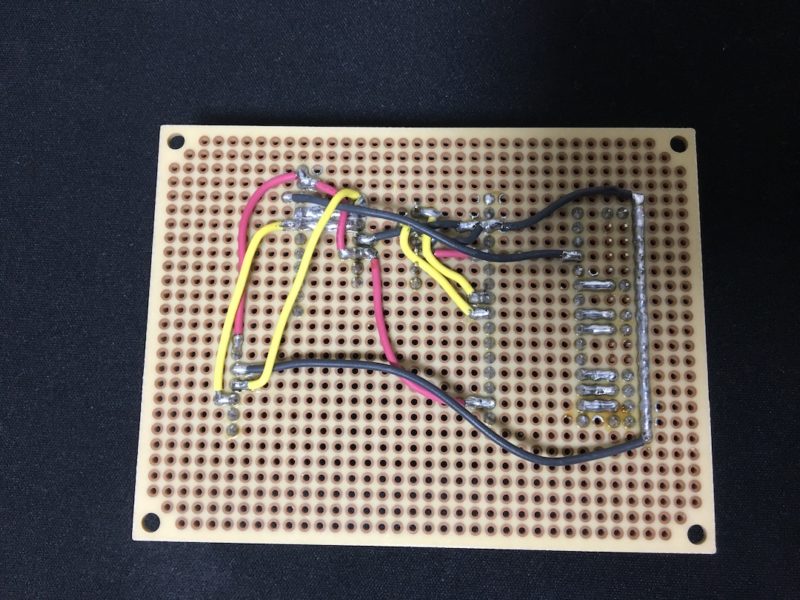
基盤の配線
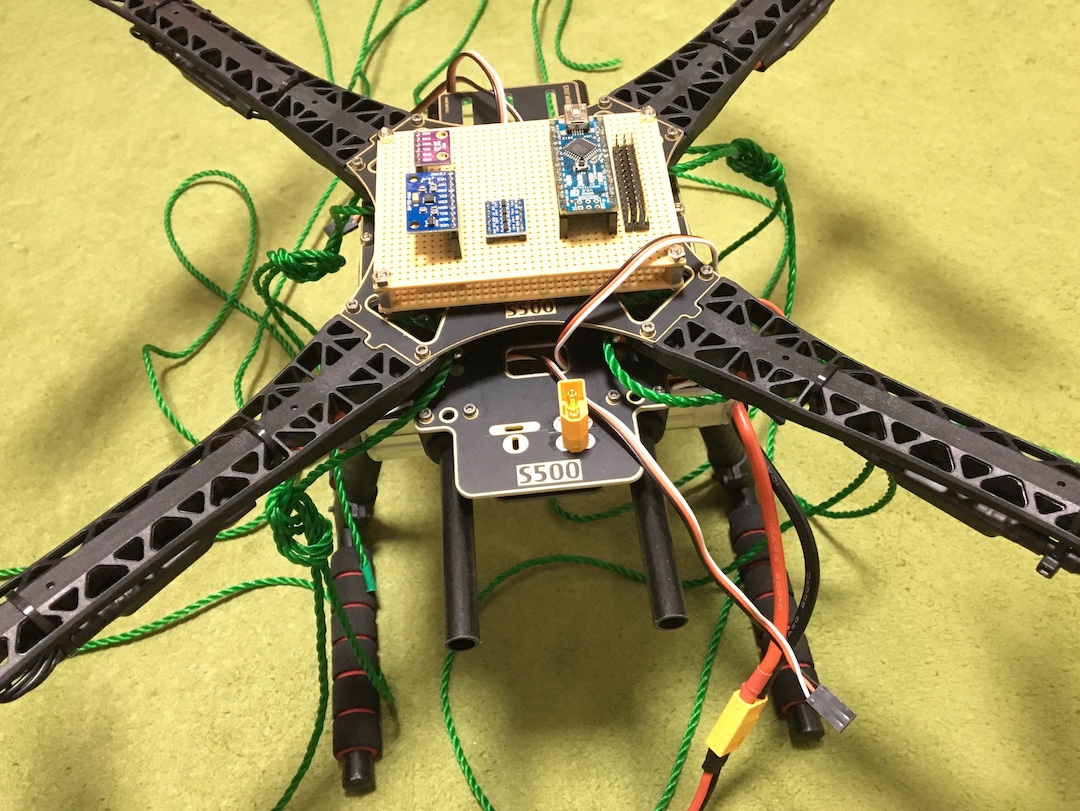
プリント基板を作る気力はなかったのでユニバーサル基板に気合の配線でどうにかしています。
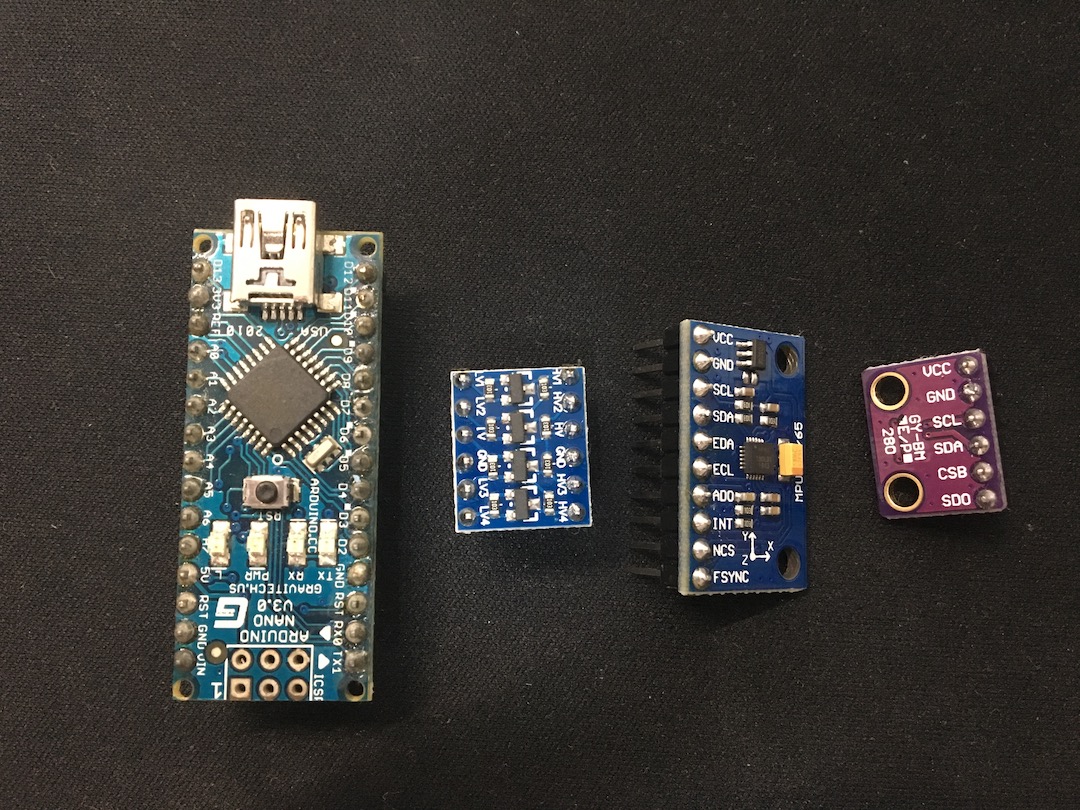
配線は次のようになっています。
- Arduino 5V > 変圧器 HV
- Arduino GND > 変圧器 GND(2箇所)、MPU9250 GND、BME280 GND
- Arduino A4(I2C:SDA) > 変圧器 HV3
- Arduino A5(I2C:SCL) > 変圧器 HV4
- 変圧器 LV3 > MPU9250 SDA、BME280 SDA
- 変圧器 LV4 > MPU9250 SCL、BME280 SCL
また、ESC用にArduinoのPWD用ピン(D3、D5、D6、D9、D10、D11)とGNDをピンヘッダに繋げています。
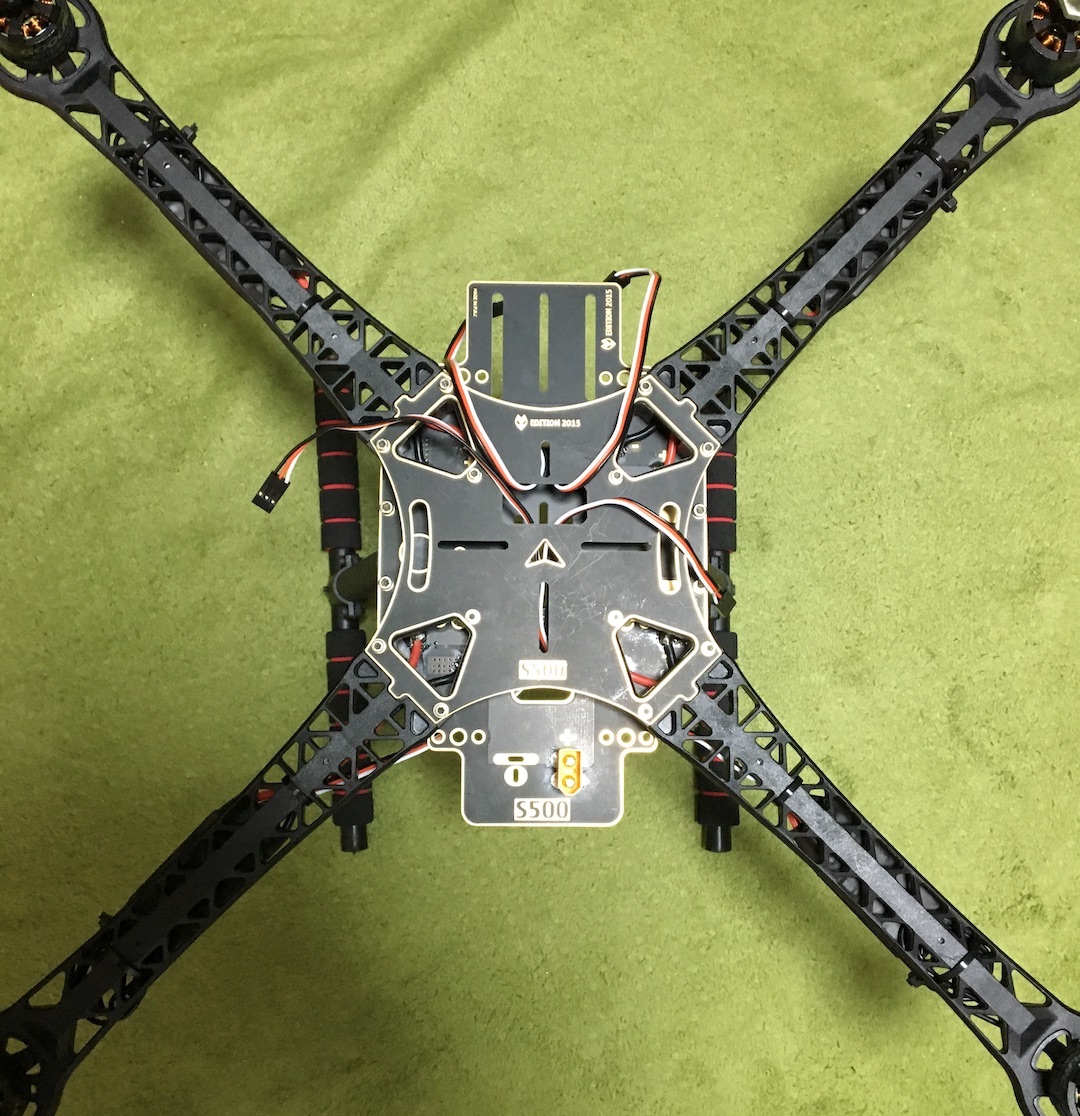
大まかな部品の組み立て
フレームをある程度組み立ててからメインフレーム(分電盤)とESCをはんだ付けしたり、モーターを取り付けたのですが、やりにくくて順番を間違えた感がすごかったです。
多分、配線をした後に組み立てた方が良かったです。
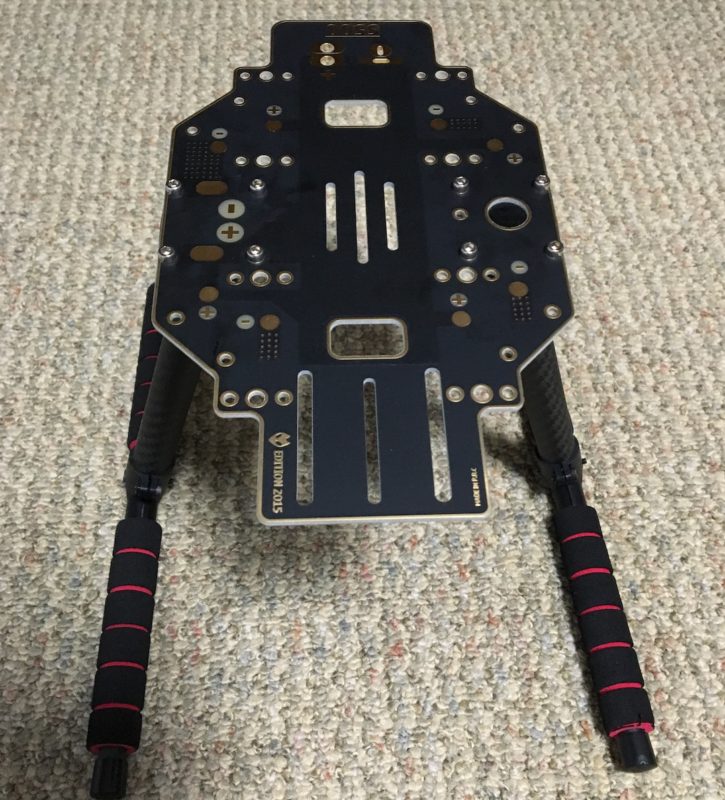
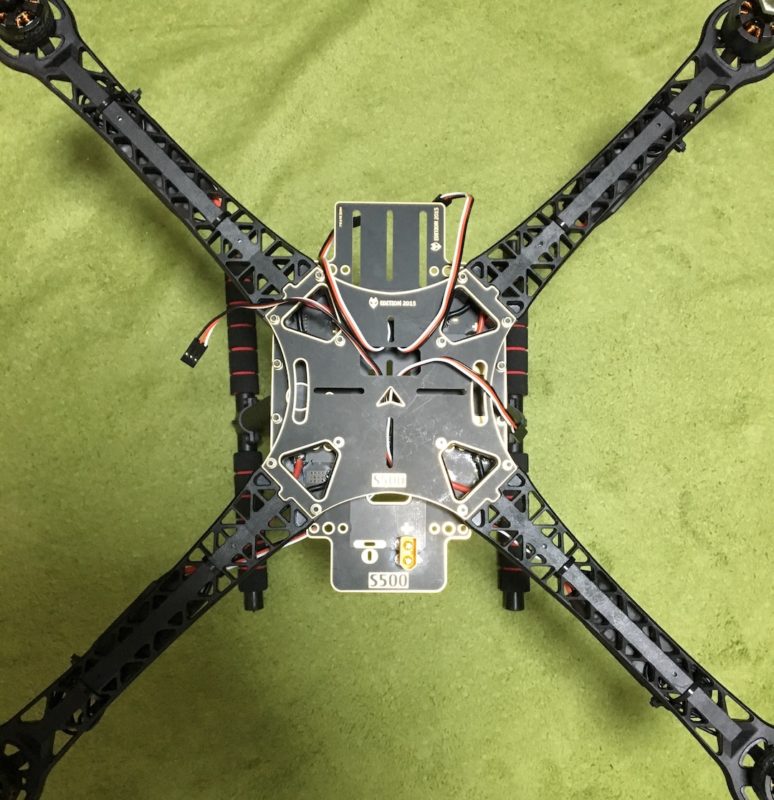
S500フレームの組み立て
簡単な説明書が付いていました(全然見てないですが)。


バナナプラグの取り付け
ESCのモーター接続用端子がバナナプラグ(メス)だったのでモーターの端子にバナナプラグ(オス)を取り付けました。
バナナプラグは多めにはんだを流し込むとちょうど良い感じです。一応収縮チューブで覆っておきます。



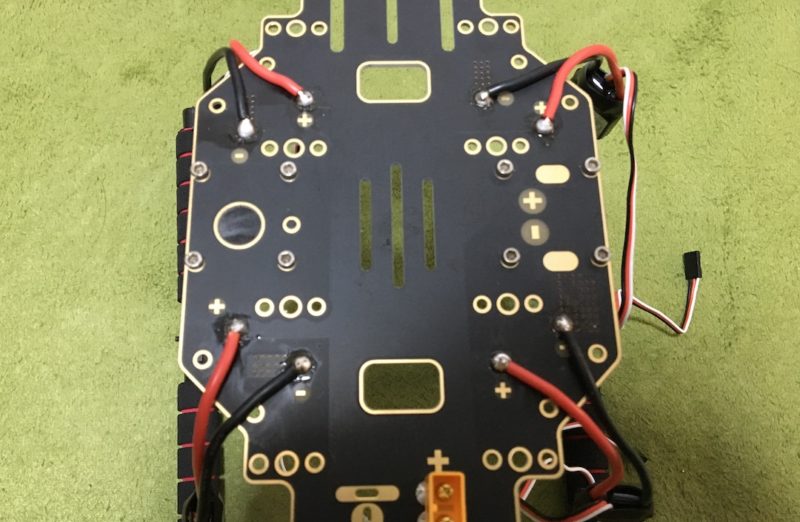
分電盤とESCのはんだ付け、モーターの取り付け
足を先に取り付けてしまっていたのでやりにくかったですが、気合いです。
Lipoバッテリー用のXT60端子も取り付けています。

最後に
とりあえずこれで姿勢推定やPID制御のプログラムを書く準備ができました。
しばらくは実験しながらプログラムを書き込んでいきます。
無線とかGPSとかどうしましょうね…。
コメント